▼ 2009/11/14(土) 活動してます
【未分類】
4年になっても日記を使ってちゃ後輩のためにも良くないと思ってましたが
作ってるなら更新したら?
と言われましたんでLT班の日記久しぶりの更新です。
LT班の近況から
今年の大会には1年、3年、自分の3台出場予定です。
1年は1から作るのは大変なのでロボチャレで使用したマシンを改良して出場
3年はギアボックス、回路(モータ回路だけエッチング)等自作してがんばってます。
3年のマシンは10月頃にはもう一応完成していたのですが
その後問題点が複数見つかり、修正にけっこう時間がとられてますが
細かいことは3年がいつか日記を書いてくれると信じて待っててください。
で、参加競技が変わりましたので
コースも新しく自作しました。
カーブがほとんどR10で、十字にS字に
さらにはコース同士が近くなり過ぎて隣のコースのマーカが影響してしまったりと
結構な難易度なのではないかと思ってます。

自分のマシンに関しては長くなったんで続きに
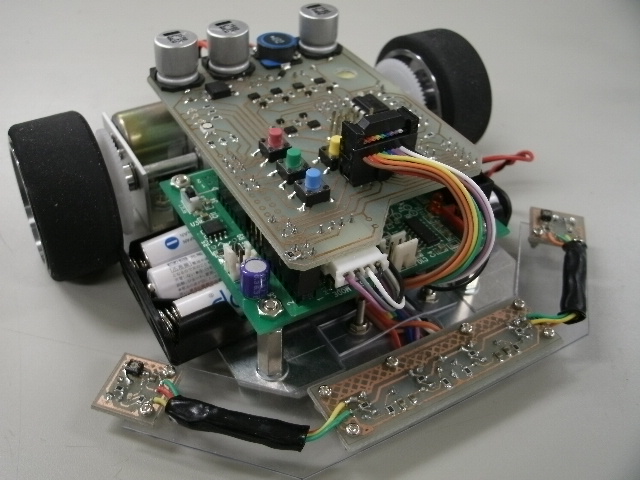
フルカラーLEDがやたら眩しいマシンです。


スペック
サイズ 155*150*57
重量 460g
マイコン H8/3048F-ONE
電池 単4eneloop*6(電池BOX使用)
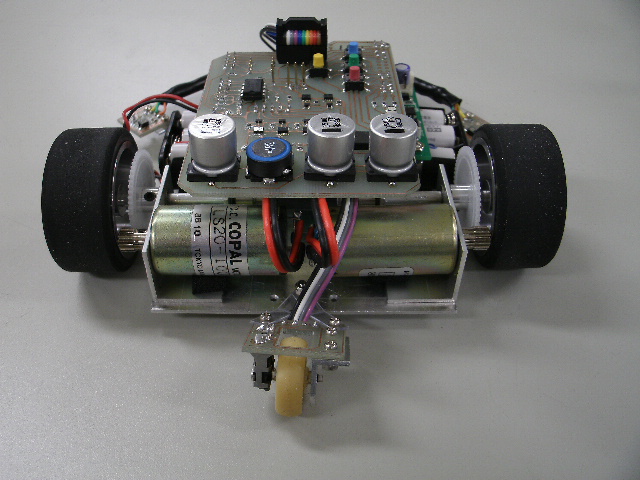
モータ COPAL LS20-100*2(詳細不明品)
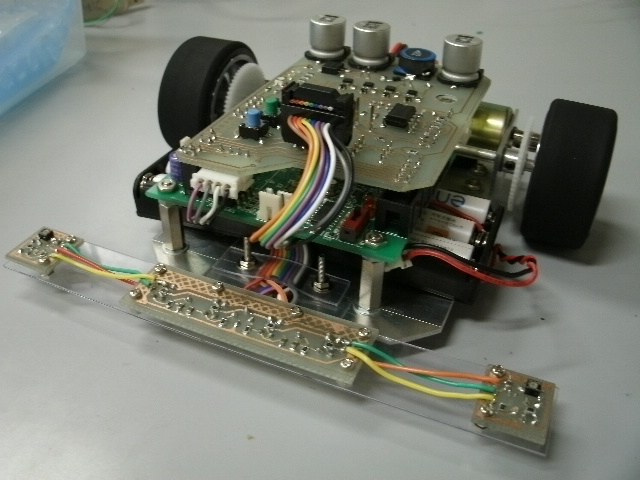
センサ GP2S40*6 (4個トレース用 2個マーカ用)
PCマウスのエンコーダ(詳細不明品)
回路には256KbitのEEPROMやらHブリッジ*3やら無駄にでかいコンデンサーやら加速度センサやら
のっけてますが半分ぐらいは本当に無駄で、
特に加速度センサはケチったせいでまともにデータを取れませんでした。
頑張れば加速度があるかないか、ぐらいは判別できるかもしれません。
壊れたPC用のUSBマウスから取り出して使用したエンコーダは一応動きましたが
分解能が低い、位相係数ではなく割り込みを応用して計測している、
など不安な点がいっぱいです。
肝心の走行ですが、まだ3割ぐらいのスピードしか出していませんが
PD制御でそこそこ安定して走ってくれます。
今現在、スタートさせてゴールしたら止まるところまでは出来るようになりました。
時々マーカを無視してしまうこととカーブの判定がまだ上手くいかないことが問題です。
ちなみにこのマシン、初期とはセンサの形状が異なります。

↑初期型 。 。 。 。 。 。 。 。 。現在↑
変更した理由はマーカ検出用センサがトレース用センサの真横にあると
カーブ終了時にマーカを検出してくれなかったからです。
今の場所でもR10のUターンでは検出できず、カーブの終わりを見つけるのに苦労してます。
とりあえず完走第一ですが
加減速走行出来るようになるのを目標に
研究の合間合間にやっていきます。
作ってるなら更新したら?
と言われましたんでLT班の日記久しぶりの更新です。
LT班の近況から
今年の大会には1年、3年、自分の3台出場予定です。
1年は1から作るのは大変なのでロボチャレで使用したマシンを改良して出場
3年はギアボックス、回路(モータ回路だけエッチング)等自作してがんばってます。
3年のマシンは10月頃にはもう一応完成していたのですが
その後問題点が複数見つかり、修正にけっこう時間がとられてますが
細かいことは3年がいつか日記を書いてくれると信じて待っててください。
で、参加競技が変わりましたので
コースも新しく自作しました。
カーブがほとんどR10で、十字にS字に
さらにはコース同士が近くなり過ぎて隣のコースのマーカが影響してしまったりと
結構な難易度なのではないかと思ってます。

自分のマシンに関しては長くなったんで続きに
フルカラーLEDがやたら眩しいマシンです。
スペック
サイズ 155*150*57
重量 460g
マイコン H8/3048F-ONE
電池 単4eneloop*6(電池BOX使用)
モータ COPAL LS20-100*2(詳細不明品)
センサ GP2S40*6 (4個トレース用 2個マーカ用)
PCマウスのエンコーダ(詳細不明品)
回路には256KbitのEEPROMやらHブリッジ*3やら無駄にでかいコンデンサーやら加速度センサやら
のっけてますが半分ぐらいは本当に無駄で、
特に加速度センサはケチったせいでまともにデータを取れませんでした。
頑張れば加速度があるかないか、ぐらいは判別できるかもしれません。
壊れたPC用のUSBマウスから取り出して使用したエンコーダは一応動きましたが
分解能が低い、位相係数ではなく割り込みを応用して計測している、
など不安な点がいっぱいです。
肝心の走行ですが、まだ3割ぐらいのスピードしか出していませんが
PD制御でそこそこ安定して走ってくれます。
今現在、スタートさせてゴールしたら止まるところまでは出来るようになりました。
時々マーカを無視してしまうこととカーブの判定がまだ上手くいかないことが問題です。
ちなみにこのマシン、初期とはセンサの形状が異なります。
↑初期型 。 。 。 。 。 。 。 。 。現在↑
変更した理由はマーカ検出用センサがトレース用センサの真横にあると
カーブ終了時にマーカを検出してくれなかったからです。
今の場所でもR10のUターンでは検出できず、カーブの終わりを見つけるのに苦労してます。
とりあえず完走第一ですが
加減速走行出来るようになるのを目標に
研究の合間合間にやっていきます。
▼ コメント(0件)
- TB-URL http://usamimi.info/~isys/cgi-bin/adiary/adiary.cgi/linetrace/022/tb/