B2 Akaoです。
kishimoto君が既に大会報告をしていますが、僕も書こうと思います。
最近はマウス以外にも活動していたのでどこの日記に書けばいいのかわからない状況です。
それぞれに書くのは面倒なのでまとめてマウスの日記に書いてしまおうと思います。
まず、昨日の10月19日はマイクロマウス・ロボトレースの大会だけでなく福井大学のきてみてフェアと
相撲班の北信越大会が重なって開催されました。
相撲班が全員、富山まで大会に行くということできてみてフェアの人員不足に悩まされましたが、
一年生やトレース班、4年生より上の先輩方にもお手伝いしていただき何とか人手はたりました。
昨日は一日おつかれさまでした。
さて、相撲班が大会に参加したということで相撲班の機体について
自分が知っていることを書きます。
今年の相撲ロボットは完全新作で一から作っていました。
僕が部に入部した時は動く相撲ロボットは一つもないと聞かされていたので、それを考えると
大きな進歩だと思います。
外枠は大学の施設に委託してレーザー加工してもらっていました。思ってたよりお金がかからなかったので
自分たちもCNCじゃできないことがあったら委託して作ってもらおうと思います。
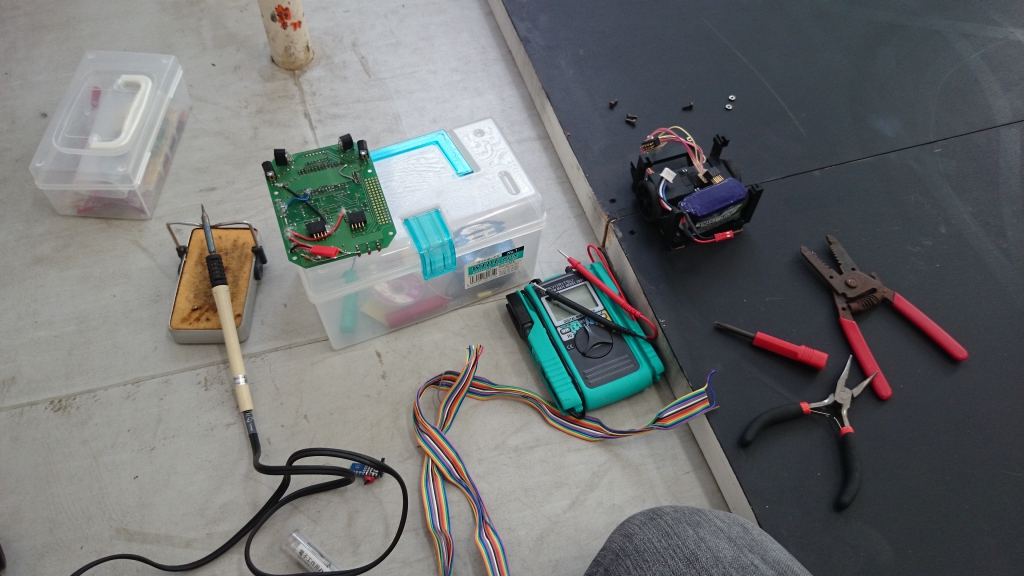
相撲のハード完成に至るまでにはいろいろな困難がありました。
ユニバーサル基板に鏡面で配線したり、そのためにマイコンボードを新しく買ってきて裏向きで配線したり、
そのマイコンボードがショートで壊れて新たに普通の状態のマイコンボードのピンを抜いて裏向きでつけかえたりもしました。
ハードが完成したのは大会1週間ぐらい前のことでした。
自分は同じマイコンボードを使っていたのでプログラムを担当しました。
とにかく大会に出してもちゃんと動いてくれるように、基本的な相手の追従や白線を検知してのターンを実装しようと
プログラムを書いていくと、相撲ロボットのモータードライバーから火花が散るということが起きすっごく焦りました。
マウスやトレースで火花が散るということは早々ないので相撲はやっぱり怖いと感じました。
大会前々日までにはMAXスピードを出せるように調節もでき、最低限の相撲ロボットの動きはプログラムできました。
結局、大会では勝てなかったようですが昨年よりいろいろな技術力もあがっていたと思います。
次に自分の参加した北信越北信越大会ですが、結果から言うと
マイクロマウス クラシック 2位、3位
ロボトレース 2位、3位
となりました。
自分のロボットについての考察を書いていこうと思います。
まずライントレースについて
ライントレースは中部初級者でも出した機体で参加しました。第一区画が加速しないバグがありましたが、北信越大会では問題なく
加速してくれていたと思います。あと、積分項の実装によりさらに安定した走行ができたと思います。
大会参加者の人からセンサーを増やして、直進判定をすれば直進がよくなるとのアドバイスをいただきました。
スピードを上げた時にコースアウトするのは蛸壺と直線なので、次の課題が見つかったと思います。
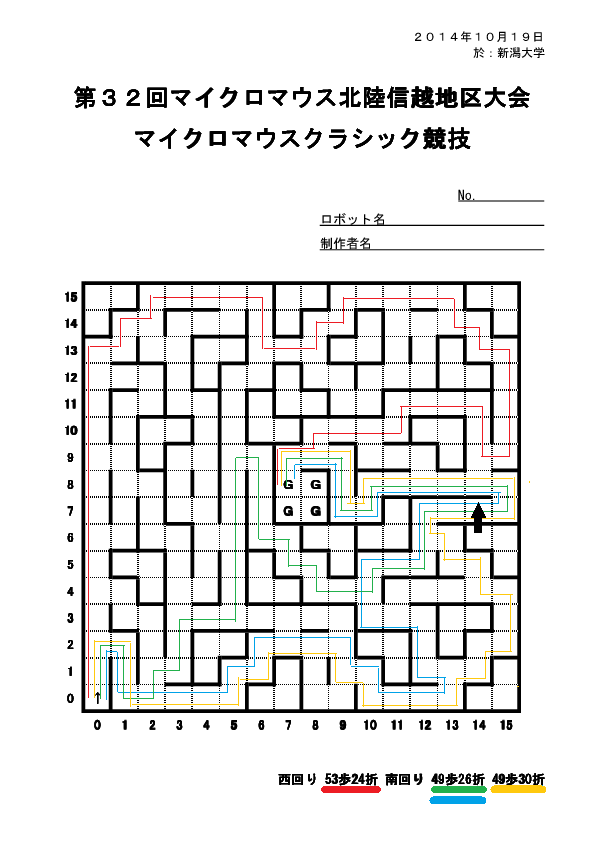
次にマイクロマウスについて
第一走行はスラロームで足立法の全面探索をしました。
危なそうな走行は何度もありましたが、全面探索は成功することができました。
第二走行、第三走行では直線優先の最短走行をしましたが、本当の直線優先経路を見つけることができませんでした。
ただの直線1カーブ2の重みづけの等高線じゃダメということが分かっただけでもいい成果だと思います。
第四走行ではタイム的に5走目ができないと思ったので斜め走行に挑戦しようかと思い走らせましたが、半分も進む前にこけてしまいました。
まず、探索スピードが自分の機体は遅いと思います。このままじゃ時間切れになってしまうのでまず探索スピードを上げたい。
それに伴ってスラロームスピードも上げていきたい。
斜め走行に関しては付け焼刃で作ったので全ての駆動モジュールを調整してさらに壁切れ補正を入れたい。
等高線マップの作製も本当の直線優先と斜め優先の2種類を新たにつくりたい。
「やりたい」ばっかりだけど全日本までに全部実装をめざしてガンバリマス。
kishimoto君が既に大会報告をしていますが、僕も書こうと思います。
最近はマウス以外にも活動していたのでどこの日記に書けばいいのかわからない状況です。
それぞれに書くのは面倒なのでまとめてマウスの日記に書いてしまおうと思います。
まず、昨日の10月19日はマイクロマウス・ロボトレースの大会だけでなく福井大学のきてみてフェアと
相撲班の北信越大会が重なって開催されました。
相撲班が全員、富山まで大会に行くということできてみてフェアの人員不足に悩まされましたが、
一年生やトレース班、4年生より上の先輩方にもお手伝いしていただき何とか人手はたりました。
昨日は一日おつかれさまでした。
さて、相撲班が大会に参加したということで相撲班の機体について
自分が知っていることを書きます。
今年の相撲ロボットは完全新作で一から作っていました。
僕が部に入部した時は動く相撲ロボットは一つもないと聞かされていたので、それを考えると
大きな進歩だと思います。
外枠は大学の施設に委託してレーザー加工してもらっていました。思ってたよりお金がかからなかったので
自分たちもCNCじゃできないことがあったら委託して作ってもらおうと思います。
相撲のハード完成に至るまでにはいろいろな困難がありました。
ユニバーサル基板に鏡面で配線したり、そのためにマイコンボードを新しく買ってきて裏向きで配線したり、
そのマイコンボードがショートで壊れて新たに普通の状態のマイコンボードのピンを抜いて裏向きでつけかえたりもしました。
ハードが完成したのは大会1週間ぐらい前のことでした。
自分は同じマイコンボードを使っていたのでプログラムを担当しました。
とにかく大会に出してもちゃんと動いてくれるように、基本的な相手の追従や白線を検知してのターンを実装しようと
プログラムを書いていくと、相撲ロボットのモータードライバーから火花が散るということが起きすっごく焦りました。
マウスやトレースで火花が散るということは早々ないので相撲はやっぱり怖いと感じました。
大会前々日までにはMAXスピードを出せるように調節もでき、最低限の相撲ロボットの動きはプログラムできました。
結局、大会では勝てなかったようですが昨年よりいろいろな技術力もあがっていたと思います。
次に自分の参加した北信越北信越大会ですが、結果から言うと
マイクロマウス クラシック 2位、3位
ロボトレース 2位、3位
となりました。
自分のロボットについての考察を書いていこうと思います。
まずライントレースについて
ライントレースは中部初級者でも出した機体で参加しました。第一区画が加速しないバグがありましたが、北信越大会では問題なく
加速してくれていたと思います。あと、積分項の実装によりさらに安定した走行ができたと思います。
大会参加者の人からセンサーを増やして、直進判定をすれば直進がよくなるとのアドバイスをいただきました。
スピードを上げた時にコースアウトするのは蛸壺と直線なので、次の課題が見つかったと思います。
次にマイクロマウスについて
第一走行はスラロームで足立法の全面探索をしました。
危なそうな走行は何度もありましたが、全面探索は成功することができました。
第二走行、第三走行では直線優先の最短走行をしましたが、本当の直線優先経路を見つけることができませんでした。
ただの直線1カーブ2の重みづけの等高線じゃダメということが分かっただけでもいい成果だと思います。
第四走行ではタイム的に5走目ができないと思ったので斜め走行に挑戦しようかと思い走らせましたが、半分も進む前にこけてしまいました。
まず、探索スピードが自分の機体は遅いと思います。このままじゃ時間切れになってしまうのでまず探索スピードを上げたい。
それに伴ってスラロームスピードも上げていきたい。
斜め走行に関しては付け焼刃で作ったので全ての駆動モジュールを調整してさらに壁切れ補正を入れたい。
等高線マップの作製も本当の直線優先と斜め優先の2種類を新たにつくりたい。
「やりたい」ばっかりだけど全日本までに全部実装をめざしてガンバリマス。