▼ 2014/10/19(日) 北陸信越大会
B2 Kishimotoです。
北陸信越大会に行ってきました。

結局RXでの出走はかなわず、H8で出てきました。
金曜日の段階ではMTUが動いてくれない状況で、モータが回らず。
色々いじってたらモータドライバから煙が。
予備は部室にあるものの時間は12時。
守衛さんに泣きついて部室棟を開けてもらって修理しました。
土曜日は朝7時に出発し12時頃に到着、新潟大学では学祭が行われていました。
我々が一番乗りだったので、そのまま迷路のセッティングを手伝いました。
さすがに北信越は歴史が古く、迷路の劣化もかなりのもので、
壁が変色しているのはまだいいほう、柱の隙間と壁の金属部分の大きさが合わず、その場で壁の補修をしていました。



迷路が完成しいざ試走をしてみようと書き込みをしてみるものの接続エラー。
金曜日にパルスが出ているかどうかオシロでみたら波形が変だったのを思い出し
書き込み端子のGNDとベタGNDを導通チェックしてみると音が鳴らず。
見事にパターンが切れていました。(いつ切れたんだろう…?)

試走会後は車中で相撲班のデバッグを手伝いつつ懇親会会場へ。
人数は少なめでしたがいろんな話を聞けました。
今回はホテルが高かったので漫喫で寝ました。
日曜日の朝にモード関連をいじって最短走行後に足立で探索しながら帰ってくるように変更したんですが、これが後々悲劇を生むことに。
1走目は足立でゴールしてから全面探索。コケそうな場面もありましたがなんとか戻ってこれました。
2走目は直線0.8m/sで最短。成功。15秒84
3走目は直線1.0m/sで最短。失敗。壁がテープの跡が汚く、しかも柱にはまらないのでテープで固定されていたのが原因か?探索して帰ってくる設定だったのでマップ情報が壊れました。
4走目はマップ情報が壊れているのに気づかず最短をさせて壁に向かって突進。
5走目は電源入れ直してマップ情報を消去。足立でゴールしてお茶を濁そうとしたら焦ってゴール位置の設定を忘れて1区画前進→180度ターン→1区画前進して無事(0,0に)ゴールしました。
というわけでタイム的には3位でしたが1,2位が同一人物だったので繰り上がりで2位入賞。
試走会では1.5m/sくらい出せるかな?という感じだったので個人的には不完全燃焼です。
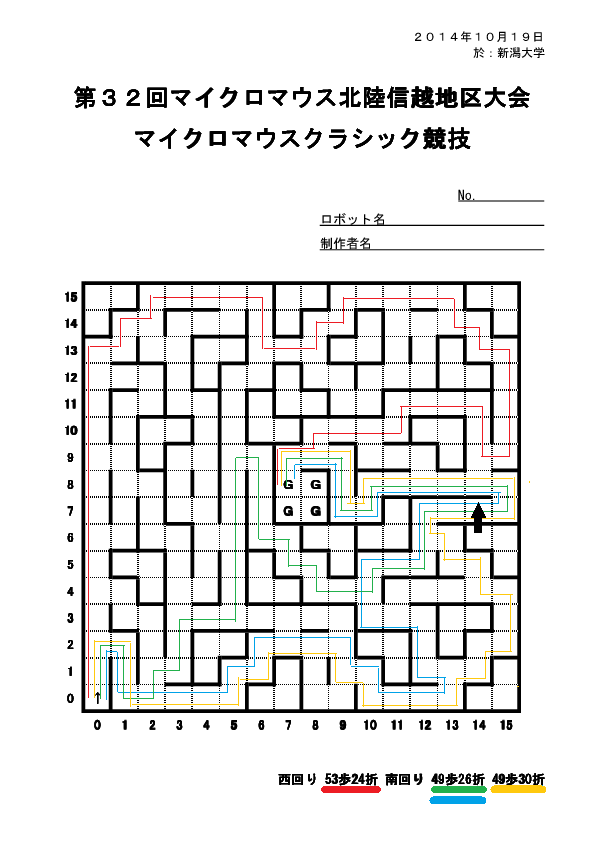
矢印の壁がコケた壁です。
全面探索した時は緑色の経路を選択。足立で探索→足立で帰ってくる探索をした後だと青の経路を選択しました。(直進部分が長いので緑のほうが速い?)
が、真の直進優先は赤でした。
現在の重み付けは直進で1、ターンで2なので、
緑、青:49+26=75
赤 :53+24=77
となり南回りを走行したようです。長い直進があったら重みを減らす、みたいのも必要ですね。
今後の課題
北陸信越大会に行ってきました。
結局RXでの出走はかなわず、H8で出てきました。
金曜日の段階ではMTUが動いてくれない状況で、モータが回らず。
色々いじってたらモータドライバから煙が。
予備は部室にあるものの時間は12時。
守衛さんに泣きついて部室棟を開けてもらって修理しました。
土曜日は朝7時に出発し12時頃に到着、新潟大学では学祭が行われていました。
我々が一番乗りだったので、そのまま迷路のセッティングを手伝いました。
さすがに北信越は歴史が古く、迷路の劣化もかなりのもので、
壁が変色しているのはまだいいほう、柱の隙間と壁の金属部分の大きさが合わず、その場で壁の補修をしていました。



迷路が完成しいざ試走をしてみようと書き込みをしてみるものの接続エラー。
金曜日にパルスが出ているかどうかオシロでみたら波形が変だったのを思い出し
書き込み端子のGNDとベタGNDを導通チェックしてみると音が鳴らず。
見事にパターンが切れていました。(いつ切れたんだろう…?)
試走会後は車中で相撲班のデバッグを手伝いつつ懇親会会場へ。
人数は少なめでしたがいろんな話を聞けました。
今回はホテルが高かったので漫喫で寝ました。
日曜日の朝にモード関連をいじって最短走行後に足立で探索しながら帰ってくるように変更したんですが、これが後々悲劇を生むことに。
1走目は足立でゴールしてから全面探索。コケそうな場面もありましたがなんとか戻ってこれました。
2走目は直線0.8m/sで最短。成功。15秒84
3走目は直線1.0m/sで最短。失敗。壁がテープの跡が汚く、しかも柱にはまらないのでテープで固定されていたのが原因か?探索して帰ってくる設定だったのでマップ情報が壊れました。
4走目はマップ情報が壊れているのに気づかず最短をさせて壁に向かって突進。
5走目は電源入れ直してマップ情報を消去。足立でゴールしてお茶を濁そうとしたら焦ってゴール位置の設定を忘れて1区画前進→180度ターン→1区画前進して無事(0,0に)ゴールしました。
というわけでタイム的には3位でしたが1,2位が同一人物だったので繰り上がりで2位入賞。
試走会では1.5m/sくらい出せるかな?という感じだったので個人的には不完全燃焼です。
矢印の壁がコケた壁です。
全面探索した時は緑色の経路を選択。足立で探索→足立で帰ってくる探索をした後だと青の経路を選択しました。(直進部分が長いので緑のほうが速い?)
が、真の直進優先は赤でした。
現在の重み付けは直進で1、ターンで2なので、
緑、青:49+26=75
赤 :53+24=77
となり南回りを走行したようです。長い直進があったら重みを減らす、みたいのも必要ですね。
今後の課題
センサーチェックが簡単にできるモードを搭載するマウスだけで閾値を変えられるように(最初に閾値を自動で取得するようにした)
センサーの取り付け角度の調整(あまり効果が感じられない)ジャイロセンサを載っけた上でスラローム走行(スラロームだけ)探索アルゴリズムの改善足立でとりあえずゴールしてから全面探索?袋小路に入らないよう、仮想壁を立てる- 探索済み区間は加速
モーターの換装(pi:coには勝ちたい)加速度テーブルも変更(台形加速に変更)
- EEPROMの搭載(RXのデータフラッシュを使うか?)
- LCDの搭載
- 壁切れ補正
- RXに載せかえる
袋小路での位置調整- 斜め走行(Akao君に先を越された)
- コケた時の対策
- 最短経路の直進優先の改善
▼ コメント(0件)
- TB-URL http://usamimi.info/~isys/cgi-bin/adiary/adiary.cgi/mouse/0128/tb/